INS(Inertial Navigation System)
Aerospace
Introduction
항공기가 자신의 위치를 알 수 있는 방법에는 3가지가 있다. 첫 번째는 VOR 항법이다. 기지국에서 초단파 신호를 360도 전방위로 방사하고, 거리측정장치를 이용해 기지국이 항공기의 위치를 특정하는 방식이다. 항공기의 다른 항법 장치가 사용 불가능할 때 관제탑은 기지국을 원점으로 위치를 알려줄 수 있다. 그러나 극지를 지나는 항로를 비행하거나 군용기의 경우는 이 방법을 사용할 수 없는 경우가 있다. 전세계 모든 위치에 기지국이 설치 되어있는 것도 아니고, 적진을 침투 중일 때 적군 시설에게 "내가 지금 어디있는지 알려달라"할 수는 없는 노릇이다. 또 다른 방법으로는 GPS(위성항법장치)가 있다. 본래 군용이었으나 민간에 사용 허가 된 이후 항공기에게 매우 유용한 수단이 되고 있다. 그러나 이 또한 사용이 불가능한 지역이 있고 마하 0.7 정도로 날아다니는 항공기에게 근본적으로 대체 가능한 항법 수단은 아니다. 그래서 항공기에서 가장 주로 사용하는 항법 장치는 이 글의 주제인 INS이다.
INS, 즉 관성 항법 장치는 모션 센서를 사용하여 초기 시작점을 기준으로 물체의 위치, 속도, 방향을 계산하는 독립적인 내비게이션 시스템이다. 이때 '독립적'의 의미는 기체 안에서 얻은 정보만으로 다음 위치를 예측할 수 있다는 것이다. 이 장점 때문에 주된 항법 장치가 INS인 것이다. INS는 항공기의 눈과 귀의 역할을 하며, 외부 장치에 관계 없이 작동한다.
1960년대까지 항공기에서 가장 많이 사용되었던 항법은 천측 항법과 나침반이었다. 이때 이전에도 INS는 존재했으나, 오차가 너무 커서 차라리 하늘을 보고 항로를 비행하는 것이 오히려 나았던 것이다. 실제로 2006년에 단종된 B 717의 경우에도 별을 관측하기 위한 창이 조종석에 나있다(애초에 비상용으로 만들어진 것이고, 시간이 지날수록 조종사에게 태양에 의한 눈뽕이 심해지자 아예 창을 막아버리는 추세이긴 하다. 그렇지만 현대까지도 여전히 INS에 완전히 의지할 수 없음을 알 수 있는 대목이다.) 이 천측 항법과 나침반 등을 완전히 대체한 항법이 바로 INS장치인 것이다.
보통 INS에 대해 사람들은 고속으로 회전하는 코어와 거기 붙어있는 센서, 그리고 자이로스코프를 생각한다. 이것은 기계식 INS로 IMU(Inertial Measurement Unit)을 사용하며 현재는 거의 쓰이지 않는 방식이다. 현재에 사용하는 INS는 크게 MEMS, RLG, FOG이다. 이들 모두 스트랩다운 방식으로, 기존의 기계식에 비해 훨씬 작고 효율적이다. 스트랩다운 방식은 기체에 착 붙이기만 해도 작동할 수 있음을 말한다. 기계식 INS는 자이로스코프를 통해 센서를 초기 상태와 똑같이 정렬한 상태여야만 측정값을 신뢰할 수 있었지만, 이들 스트랩다운이 가능한 방식들은 기체가 공중제비를 돌아도 작동한다는 것이다. 이들 방식에 대해 차차 설명하도록 하겠다.
종류별로 설명하기 전에, 모든 INS는 치명적인 단점이 있다. 바로 오차가 계속해서 쌓여간다는 것이다. 초기 위치를 원점으로 하여 다음 위치를 미소 시간 동안 가속도와 방향으로 계산한다. 이 방식을 오일러 방식이라고 한다. 그런데, 매우 특수한 경우를 제외하고 다음 위치를 구하기 위해서는 근사가 필요하다. 이러한 매우 작은 근사가 쌓여 오랜시간 비행하면 이 오차는 계속해서 쌓이고, 결국 신뢰할 수 없게 된다. (초기 INS가 탑재된 B 747-400의 경우 시간당 오차가 무려 2kM였다!) 그래서 GPS등과 같은 보조 수단과 병행해서 사용하는 것이다. 이런 오차는 항공기의 궤적에 따라 고유하게 부여되는 것이므로, 오차를 최대한 줄이려면 장치 자체가 엄밀하고 정교해져서 측정 오차를 줄이는 수 밖에 없다. 앞으로 나올 INS들은 전부 측정 오차를 줄이는 방향으로 진화한 것들이다.
기계식 INS
(IMU 사용)
최초로 독일이 V-2로켓에서 처음으로 사용했고, 제대로 쓰인 것은 아폴로 프로젝트에서 우주공간 항해였다. 아폴로는 GPS와 같은 장비 대신 별을 보고 오차를 보정했다.
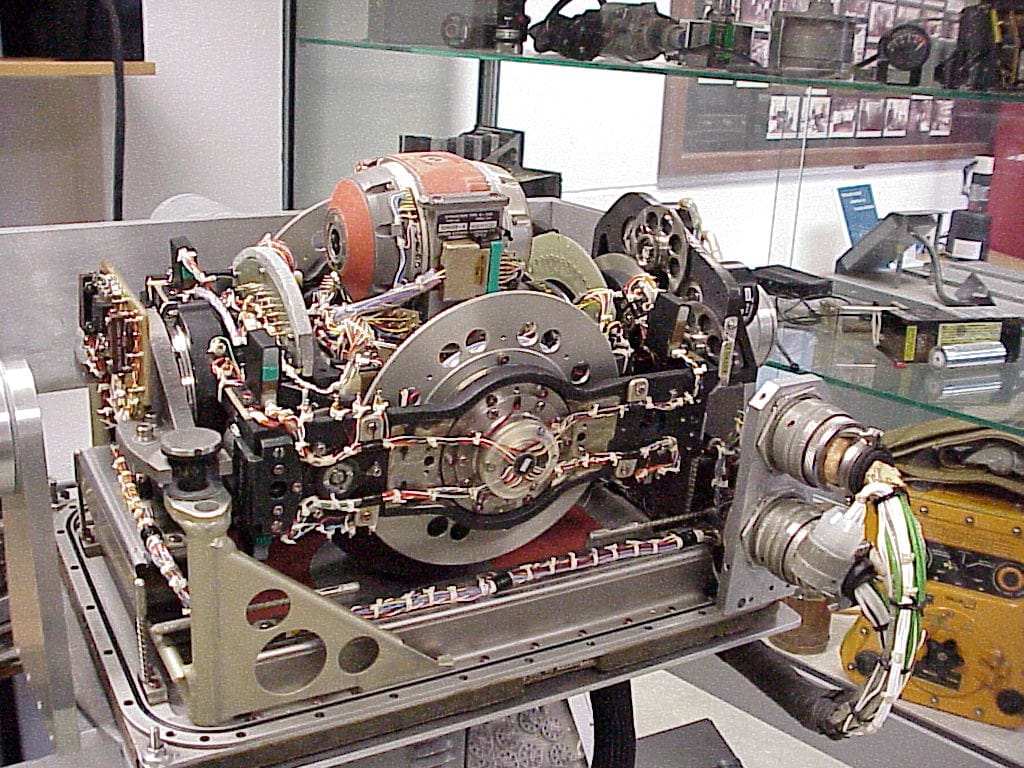
현재 대부분의 INS 장치는 기밀 기술로 분류되어 공개된 것이 많지 않다. 그렇지만 예로 들 수 있는 장치가 하나 있다. LN-3-2A이다. F104-G에 탑재된 고성능 기계식 INS이다. F104는 1960년대에 본래 다목적기로 개발되었으나, G모델부터 전폭기로 전용되었기에 핵무기를 정밀하게 투하할 수 있는 능력이 요구되었다. LN-3는 F-104G에 악천후에서 저고도로 항법하고 최상의 정밀도로 1,000km 범위에 핵무기를 투하할 수 있는 기능을 제공했다. 당시로서 INS를 탑재한 전투기는 전무했기에, F104G는 임무에서 굉장한 우세를 점했다.
LN3에 대해 자세히 설명하자면, 4개의 짐벌로 구성된 플랫폼 안에 3축 가속도계와 2개의 자이로가 들어있고, 거기에 컴퓨터까지 포함되어 구성되어 있다. 가속도계의 정보는 짐벌에 장착된 브러시를 통해 적분기로 전달되고, 적분기는 받은 정보를 통해 항공기의 변위와 방위를 계산한다. 가속도 정보를 적분해 속도 정보를 얻고, 속도 정보를 적분해 위치정보를 얻는다. LN3의 경우 기계적 적분기를 사용해 적분 과정이 기계적이다.(!) LN3-2A 위키백과를 참고하면 자세한 원리를 알 수 있다. 그 후 컴퓨터는 얻은 위치 정보에 대해 보정을 거친다. 지구 자전 속도 보정, 이동 속도 보정, 코리올리 보정, 그리고 관성항법 장치 자체의 오차를 보정하기 위해 슐러(Schuler) 조정을 컴퓨터가 수행한다. 슐러 보정에 대한 이야기만으로 글 한개는 뚝딱이기에 다음 글에서 소개하겠다.
LN3의 가속도계의 원리는 물리적인 진자의 움직임을 위치센서가 인식하는 원리이다. 이 위치센서의 신호를 서보 증폭기가 증폭한 후, 증폭기에서 온 전류는 '토커(Torquer)'라고 불리는 전자기 코일로 흘러 들어간다. 토커는 전류의 크기에 비례하는 전자기력을 발생시켜, 가속도로 인해 움직이려던 진자 질량을 반대 방향으로 밀어내어 원래의 위치로 돌려놓는다. 즉, (가속도에 의한 힘 == 전자기력) 상태가 되어 힘의 평형을 이룬다. 이때 사용한 전류를 정밀 저항에 흘려보내 '가속도에 비례하는 전압 신호'로 변환하여 최종 출력값을 얻는다.
이렇게 기계적인 가속도계를 이용하는 경우 짐벌 여러 개를 이용하는 매우 복잡한 구조에 충격에 민감하다는 등 여러가지 단점이 있었다. 특히, 초기 정렬이 매우 중요하기에 초기 민항기가 운항을 시작할 때 가장 먼저 하는 절차가 INS정렬과 예열이었다. 정렬에만 10분 이상이 걸리기 때문이었다. 비상 정렬을 하면 30초만에 되겠지만, 시동을 끌 때의 위치로 복귀시키는 것이기 때문에 오차가 컸다. 특히 군용기의 경우 한번 충격이라도 받으면 정렬이 틀어지는 것과 출격 준비에만 10분이 걸리는 것은 치명적이었다. 아담에어 574편은 INS 정렬 오류와 정비 불량으로 인해 적란운으로 돌진해 추락했다. 그럼에도 불구하고 기존 방식보다는 압도적으로 정확하기에 이 기술은 당대 대부분의 기체에 적용되었다. B747 초기형, DC-10, A300, 콩코드, 이 기체들은 대표적으로 기계식 INS(캐러샐 IV-A)를 탑재한 모델이며, 더 이전에는 DC-8, B707, 717, 727, 록히드 L1011 또한 기계식 INS(NTL-51)였다. 앞서 소개한 LN시리즈는 군용기에서 지속적으로 쓰였던 모델이다.
MEMS
Micro Electro Mechanical Systems
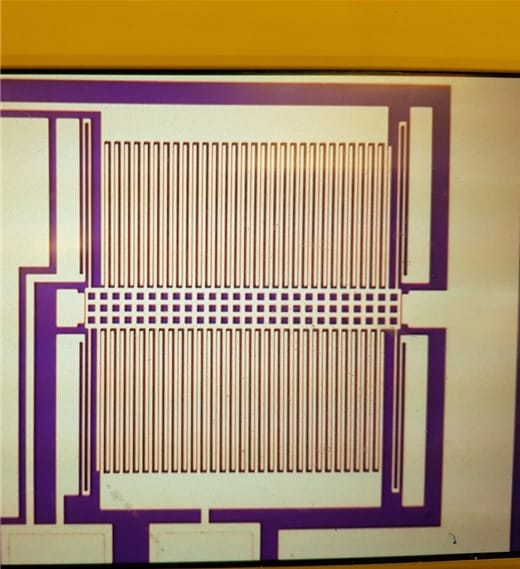
MEMS란 Micro Electro Mechanical Systems의 약자로, 초소형 기계 부품과 전자 회로를 통합한 시스템을 일컫는다. MEMS 가속도계는 초소형 전자회로를 이용한 가속도계인 것이다. MEMS 가속도계는 일반적으로 질량 블록과 탄성 지지 구조로 구성된다. 가속도가 가해지면 질량 블록이 이동하고, 질량블록이 스프링을 눌러 그 스프링의 변위를 측정하여 가속도를 계산한다. 원리 자체는 위의 기계식 가속도계와 똑같지만, 측정 방식이 다르다. 스프링이 눌릴 때, 이 변위를 측정하는 방법으로 정전 용량형과 압전 소자형이 있다. 압전 소자로 마이크로 스프링이 누르는 힘을 전기신호로 변환하는 방법이 있다. 압전 소자는 압력에 따라 저항 크기가 달라진다. 반면 정전 용량을 이용한 방식은 comb 전극을 이용해 감지한다. (평면 용량성 가속도계의 경우에)정전 용량은 comb 전극이 겹친 면적에 비례하여 증가한다. 이러한 구조들을 나노 단위로 구성해 작은 칩 크기로 가속도계가 만들어진다.
위에서 알 수 있듯이, MEMS 가속도계는 초소형, 저전력 소비라는 장점으로 사용하는 기기이다. 기계식 자이로와는 달리 초기 조건에 비해 좌표계가 틀어져도 문제없이 작동해서 정렬이 필요 없기도 하다(스마트폰 안에 짐벌이 없는 이유). 또한 크기가 작고 양산이 쉬워 싸기도 하다. 그래서 핸드폰 등의 전자기기에 탑재되는 가속도계는 전부 이것이며, 아이언돔 등 단거리이거나 저렴한 미사일에도 이 가속도계가 사용된다. (저렴한 미사일이라고 표현했지만 최소 웬만한 전자기기 이상의 정확도를 요구한다.)
MEMS 가속도계와 더불어, 자이로스코프도 존재한다. 자이로스코프가 회전 정도를 측정하여 짐벌의 역할을 대신하기에 MEMS 방식의 INS는 짐벌을 필요로 하지 않는다.
구조에서 볼 수 있듯 앞으로 소개할 FOG나 RLG에 비해서 MEMS는 상대적으로 정확도가 낮으며, 오차가 빠르게 쌓인다. 그럼에도 항공에서 사용되는 경우는 비행시간이 짧아 오차가 많이 쌓이지 않거나 많은 양을 한번에 투발하여 목표에 적중하는 경우이다. 위에서 예를 든 아이언돔은 타미르 미사일을 하드웨어로 사용하는데 이 미사일은 길이 3m로 매우 작고 많은 양을 사용하므로 항법장치가 매우 작아야 한다. 정확히 알려지지는 않았지만 이 미사일에는 MEMS가 사용되었을 가능성이 매우 높다. 또한 작은 드론에도 이 장치가 들어간다.
RLG
Ring Laser Gyro
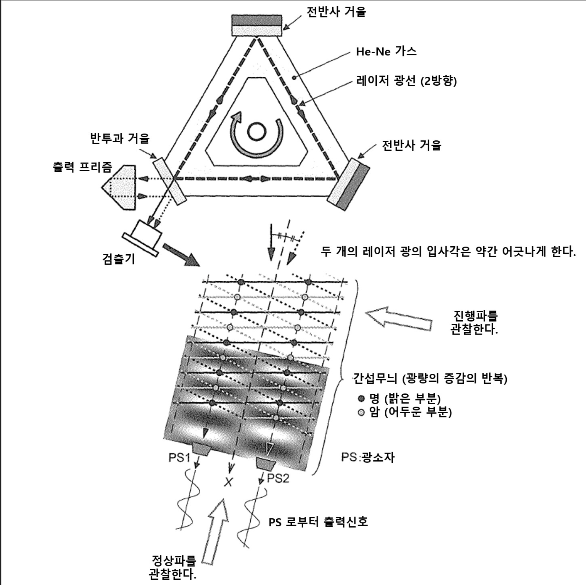
광학식 자이로 중 가장 대표적인 방식이다. 이 방식은 사냑 효과(Sagnac effect)를 이용하는데, 단순히 관성계에서 빛을 두 방향으로 쏘면 방향에 따라 이동 거리의 차이가 생겨서 위상차가 생긴다는 것이다. 아래와 같이 삼각형 혹은 사각형 형태의 네온-헬륨 가스가 들어찬 유리관에 레이저를 쏘고, 검출기에서 두 광선의 위상차를 감지한다. 이떄 위상차는 두 광선을 간섭시켜서 그 정상파를 측정한다. 회전 방향의 경우 아래쪽 그림에서 간섭광의 정상파를 두개의 검출기(ps1,ps2)가 측정하는데, 이 둘의 시간차를 통해 회전 방향과 각속도를 알아낸다.
정확도가 매우 높고, 가동부분이 작은 편이어서 신뢰성이 높다. 또한 얘는 자체적으로 회전 정도를 측정하기에 짐벌도 필요가 없다. 수학적으로 계산해서 짐벌의 역할을 대신한다. 이를 MEMS 방식과 밑에서 소개할 FOG와 더불어 스트랩다운 방식이라고 한다. 기체에 착 붙여버리면 작동하므로 스트랩다운이라고 한다.
FOG(광섬유)
Fiber Optics Gyroscope
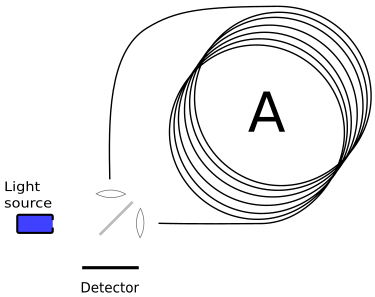

위의 RLG방식과 원리는 똑같다. 사냑 효과(Sagnac effect)를 이용하는데, 위에서 레이저로 한 바퀴만 돌린 것과는 달리 FOG의 경우 광섬유 코일을 통과하게 만들어 중첩에 의한 위상차를 RLG에 비해서 매우 증폭시킨다. 통상적으로 여기 사용되는 광섬유의 길이는 5km에 달한다(ㄷㄷ). 레이저에서 나오는 두 개의 빔이 동일한 섬유에 반대 방향으로 주입되고, 사냑 효과로 인해 회전 반대 방향으로 이동하는 빔은 다른 빔보다 경로 지연이 약간 더 짧게 된다. 결과적인 위상 차는 간섭계를 통해 측정되므로 각속도의 한 구성 요소를 측광 방식으로 측정되는 간섭 패턴의 편이로 변환한다. 일반적으로 다른 2개의 코일에 직각으로 장착되는 3개의 코일을 사용해서 3개 축 모두에서 회전을 동시에 감지한다. 즉, 3개의 축에 각각 이 장치가 달려있다.
빔 분할 광학 장치는 레이저 다이오드(또는 다른 레이저 광원)에서 나오는 빛을 여러 번 감은 광섬유로 구성된 코일을 통해 시계 방향 및 시계 반대 방향으로 전파되는 두 개의 파동으로 분할한다. 사냑 효과의 강도는 닫힌 광학 경로의 유효 영역에 따라 달라지는데, 위에서 말했듯이 이것은 단순히 코일의 기하학적 영역이 아니라 코일의 회전 수에 비례해 증가한다.
FOG는 1976년에 발리(Vali)와 쇼트힐(Shorthill)이 처음 제안했다.
- 번외 : INS의 보조, 보정수단.
지금까지 크게 4가지 종류의 INS에 대해 알아봤다. 이들 INS 모두 각각의 장단점이 있지만, 결국 가장 큰 공통점은 오일러 방법을 사용한다는 특성상 보정이 필연적이라는 것이다. 이를 위해 많은 보정 방법이 고안되었다.
첫번째로 지자기센서를 사용하는 방식이다. 나침반같은거다 ㅇㅇ 토마호크 미사일의 경우, 장거리를 활공하는 순항미사일이라 보정이 매우 필연적이다. 그런데 이 미사일은 저고도에서 느리게 활공하므로 지형대조방법을 사용해 보정한다. 순항미사일의 특성에 딱 맞는 방법이라 할 수 있다. 이 방법을 사용하기 위해서는 미사일이 지나는 곳의 지형을 모두 미사일에 업로드해야 하는데, 미국에게는 별 문제가 아닌듯하다. 가장 큰 보정 방법은 바로 GPS이다. 본래 군용으로 개발되었으나, 이제는 민항기에서 가장 많이 사용하는 것이다.
헬파이어 미사일과 같이 목표물에 적중하기만 하면 되는 경우, 보정과 같은 역할을 적외선 센서 등이 한다. 현재 진행 상황과 더불어 목표물로 유도되어야 하기에, INS와 센서의 정보를 종합해 목표물을 향해 방향타, 출력을 조정한다. 옛 경우, tow미사일은 미사일 뒤에 케이블을 달아 유선 조종을 했다. 페이브웨이 폭탄의 경우 방향타가 한쪽으로 돌아가면 그만큼 반대쪽으로 방향타를 움직이는 반도체 하나만 탑재해서 폭탄이 일직선으로 떨어질 수 있도록 장비했다.
지금까지 INS의 종류와 원리에 대해 알아보았다. 몇 십 년 전만 해도 시계 비행이 주류였던 것을 생각하면 방산을 비롯해 항공 과학의 발전 속도는 실로 감탄할 만 한 듯하다. 차세대 INS로 양자기술을 이용한 quantum gyroscope 등이 연구되고 있다고 하니 매우 기대가 된다. 다음 글에서 다시 돌아오겠다.
더 자세한 정보는 이 블로그를 참조하시라. 가속도계의 종류와 원리를 더 세부적으로 설명했다.
Reference

1

Comments ()