Blind Cubing - 2. 타겟과 셋업무브
지난 글에서는 m2op 해법의 핵심 원리인 버퍼와 타겟, 그리고 이를 이용한 순환 추적 과정을 알파벳 예시를 통해 살펴보았다.
다만 마지막에 하나의 질문을 남겨두었다: 버퍼와 타겟의 교환을 실제 큐브에서는 어떻게 구현할 것인가?
이번 글에서는 이 질문에 답하며, "타겟(Target)"과 "셋업무브(Setup Move)"에 대해 알아볼 것이다.
본격적으로 시작하기 앞서, 큐브의 회전기호(R, U, F 등)와 큐브 조각에 아직 익숙하지 않은 독자는 아래 링크를 참고해 먼저 익히고 오는 것을 권장한다.
큐브를 눈을 가리고 맞추기 위해서는 조각을 암기해야 한다는 사실을 기억하자.
앞 글에서 다뤘던 문자열과 달리, 큐브의 조각은 색깔로 구분된다.
하지만 조각들은 "초록주황" "빨강파랑"과 같이 색깔 자체로 암기하는 것은 음절이 길어 기억하기 어렵고, 혼란을 유발할 수 있다.
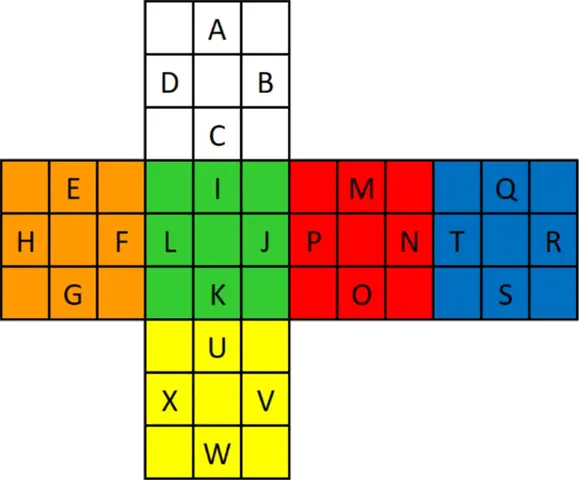
이를 해결하기 위해 큐브의 각 조각에 한글 자음 또는 알파벳을 하나씩 부여하여, 조각을 알파벳으로 부르도록 하자.
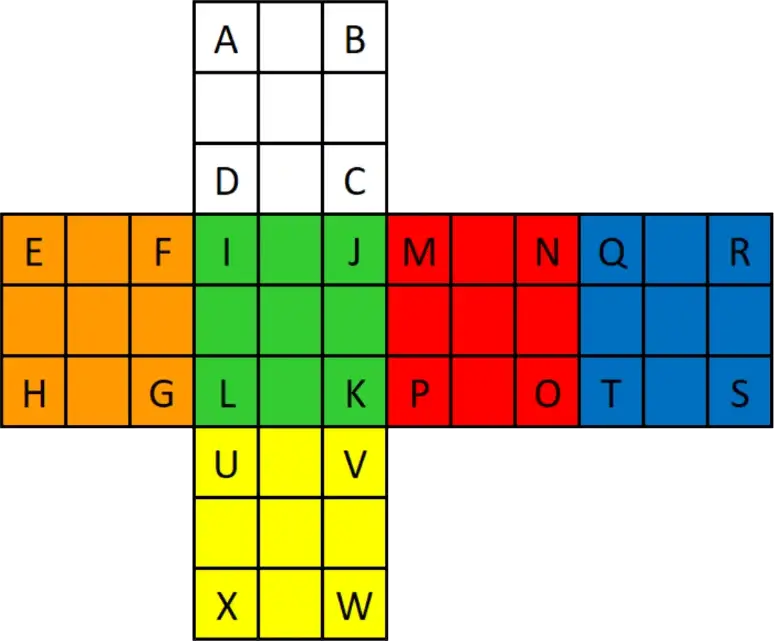
이 글에서는 아래 전개도를 기준으로 조각에 로마자 알파벳을 할당하겠다.
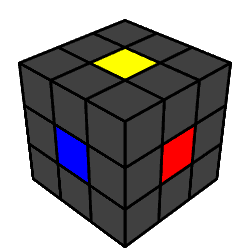
또한 흰색을 위, 초록색을 앞으로 둔 Standard Scramble Orientation을 기준으로 설명한다.
앞 글에서는 버퍼에 있는 조각을 목적지 위치로 보낼 때, 단순히 1대1 교환으로 간략화해서 나타냈다.
하지만 버퍼에 있는 조각을 곧바로 목적지로 보내는 방식, 즉 버퍼와 목적지 두 조각만 1대1로 교환하는 것은 3x3x3 큐브에서 수학적으로 불가능하다.
그렇다고 버퍼-목적지 쌍마다 별도의 3-사이클 공식을 준비해 전부 외우는 것도 현실적이지 않다. 코너의 경우 가능한 조합의 수가 너무 많기 때문이다. (이렇게 모든 3-사이클 공식을 실제로 외워서 쓰는 해법이 3-style이며, 암기 포함 20초 미만의 고수들은 대부분 이 방식을 쓴다.)
따라서 m2op 해법에서는 버퍼에 있는 조각을 바로 목적지 위치와 교환해주는 방식을 사용하지 않는다.
대신, 버퍼를 타겟(Target)위치와 교환해주고, 타겟 위치의 조각을 목적지 위치로 보내주는 과정을 반복하게 된다.
버퍼와 타겟을 교환해주는 과정을 스왑(swap)이라고 부르겠다.
예를 들어 m2op 해법의 코너 정렬 단계에서 버퍼는 A조각, 타겟은 P조각이다.
이때 사용하는 스왑 공식은 R U' R' U' R U R' F' R U R' U' R' F R 이다.
과거 스피드솔빙을 해보았던 독자라면, PLL단계의 Yperm 공식의 맨 앞과 맨 뒤에서 F만 뺀 공식이라는 것을 알 수 있을 것이다.
스왑 공식을 사용하게 되면 A조각과 P조각이 교환되는 것 뿐만 아니라 A엣지와 D엣지가 교환되는 부수적인 효과가 있다.
이때 교환되는 조각을 "부수조각"이라 부르도록 하겠다.
여기서 또 한가지 문제가 있는데, 타겟 위치의 조각을 목적지 조각으로 보내는 회전을 마음대로 사용하게 되면 큐브가 흐뜨러지게 된다.
버퍼의 조각을 목적지로 보내야 하는 과정에서, 큐브를 흐뜨러뜨리는것은 허용되지 않는다.
이를 방지하기 위해 세가지 방법으로 진행되게 된다.
- 셋업무브 (Set-up Move)
- 스왑(Swat)
- 역셋업무브(Reverse Set-up Move)
버퍼 위에 있는 조각을 X조각, X조각의 목적지 위치에 있는 조각을 Y조각 이라고 해보자.
셋업무브 에서는 Y조각을 타겟 위치로 이동시켜주면 된다.
별도의 공식을 외워 시행하는 1대1 교환이 아니다.
버퍼와 부수조각은 건드리면 안된다.
하지만 이외의 조각의 흐뜨러짐은 전혀 신경쓰지 않아도 된다.
단순히 Y조각만 타겟 위치로 보내면 된다.
셋업무브는 실제로 큐브에 어느정도 능숙한 필자라면 머릿속으로 시뮬레이션 할 수 있을 만큼 간단하다.
그 다음 SWAP 과정을 거치게 되면, 버퍼 위치에 있는 X조각은 타 위치에 있는 Y조각과 교환되게 된다.
마지막으로 역셋업무브과정을 거치고 나면, 맨 처음 셋업무브 이전 상태로 되돌아간다. 동시에 X조각과 Y조각만 서로 교환된 상태가 된다. (부수 조각 제외)
이것이 m2op 해법의 기본 원리이다.
Comments ()