Free Rotation of a Rigid Body

과학적으로 중요하게 사용된 개념에는 하이라이트를 하였다.
Introduction
이 글을 읽기 전에 자신의 핸드폰을 특정 축을 기준으로 회전 시키며 위로 던져보자. 핸드폰은 모두 무사한가요?
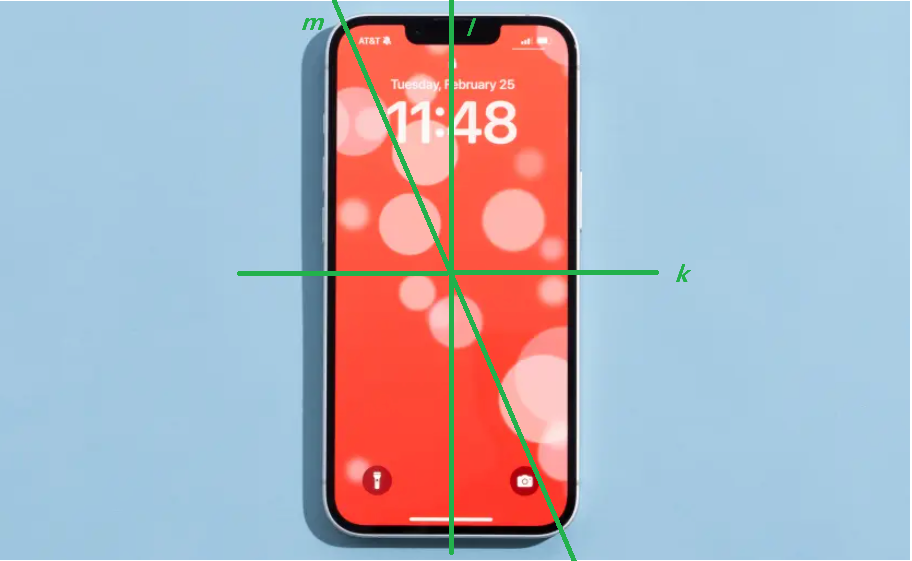
k, l, m 축을 기준으로 회전시키며 던져보면 각 회전마다 특징이 있다는 것을 알 수 있다. 필자의 기억이 틀리지 않았다면 (한번 믿어보자) k, l 축을 기준으로 회전시켰을 경우 회전축의 방향이 그대로 유지되지만, m 축을 기준으로 회전시키면 공중에서 회전축의 방향이 이리저리 바뀌는 것을 관찰할 수 있다. 왜 이러한 현상이 발생하는 것일까? 수식적으로 알아보도록 하자.
Analysis
분석에 앞서서...
가장 먼저 회전을 설명할 때 빠질 수 없는 개념인 회전 관성에 대해서 알 필요가 있다. 아래의 설명을 이해하기 위해서는 기본적으로 알고 있는 회전 관성에 대한 개념보다 조금 더 깊이 있게 이해할 필요가 있기 때문에 위키피디아에서 읽어보고 오도록 하자. 위키피디아를 믿자!

관성 텐서 부분을 읽으면 도움이 될 것이다.
본격적인 분석
먼저 Frame 을 잘 설정할 필요가 있다. 분석을 용이하게 하기 위해서 \(O-xyz\)라는 Frame 을 잡을 것이다. 이때, \(x, y, z\) 축은 강체의 주축 (관성의 곱이 모두 0 이 되도록 하는 축) 이 되도록 한다. 주축은 위의 조건을 만족해야 하므로 자연스럽게 강체에 붙어서 같이 회전하게 된다. 그림에 표현하면 아래와 같다. 참고로 \(\vec{\omega}\) 는 각속도 벡터이다.
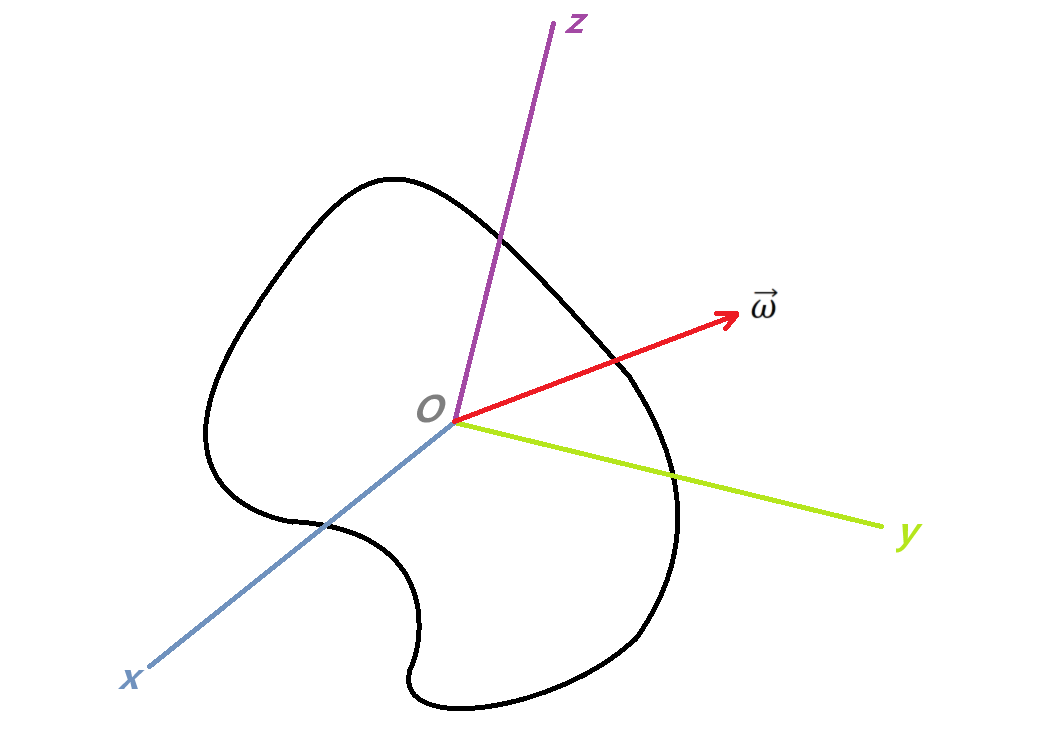
이 Frame 에서 강체가 회전을 할 때, \(\vec{L}\) (=각 운동량 벡터) 과 \(T\) (=운동에너지) 가 보존된다는 사실을 알 수 있다. 이제 위 보존량들을 회전 관성과 각속도의 식으로 표현해보자.
각 운동량 (\(\vec{L}\))
\(O-xyz\) 가 주축 Frame 이므로 관성의 곱이 모두 0이다. 따라서 이 Frame 에 대한 관성 텐서는,
\[\overset{\leftrightarrow}{\textbf{I}} = \begin{bmatrix}
I_x & 0 & 0 \\
0 & I_y & 0 \\
0 & 0 & I_z
\end{bmatrix}\]
로 표현된다. 이때 \(\vec{L} = \overset{\leftrightarrow}{\textbf{I}}\cdot\vec{\omega}\) 이므로,
\[\vec{L} = \overset{\leftrightarrow}{\textbf{I}}\cdot\vec{\omega}\
\begin{bmatrix}
I_x & 0 & 0 \\
0 & I_y & 0 \\
0 & 0 & I_z
\end{bmatrix}\begin{bmatrix}
\omega_x \\
\omega_y \\
\omega_z
\end{bmatrix}=\begin{bmatrix}
I_x \omega_x \\
I_y \omega_y \\
I_z \omega_z
\end{bmatrix}
\]
여기에서 \(\vec{L}\cdot\vec{L}\) 이 보존되기 때문에,
\[I_x^2 \omega_x^2 + I_y^2 \omega_y^2 + I_z^2 \omega_z^2 = \text{const.}\]
운동에너지 (\(T\))
회전하는 강체에서의 운동에너지는 \(T = \frac{1}{2} \vec{\omega}\cdot\overset{\leftrightarrow}{\textbf{I}}\cdot\vec{\omega}\) 로 나타나므로,
\[
T = \frac{1}{2}\begin{bmatrix}
\omega_x & \omega_y & \omega_z
\end{bmatrix}\begin{bmatrix}
I_x & 0 & 0 \\
0 & I_y & 0 \\
0 & 0 & I_z
\end{bmatrix}\begin{bmatrix}
\omega_x \\
\omega_y \\
\omega_z
\end{bmatrix}
= \frac{1}{2} \left( I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 \right)
\]
그리고 \(T\) 가 보존량이므로,
\[ I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 = \text{const.}\]
대략적인 연립의 개요
위의 두 보존량 조건을 모두 만족해야 하므로, 다음의 연립 방정식을 풀면 된다.
\[
\begin{cases}
I_x^2 \omega_x^2 + I_y^2 \omega_y^2 + I_z^2 \omega_z^2 = \text{const.}\\
I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 = \text{const.}
\end{cases}
\]
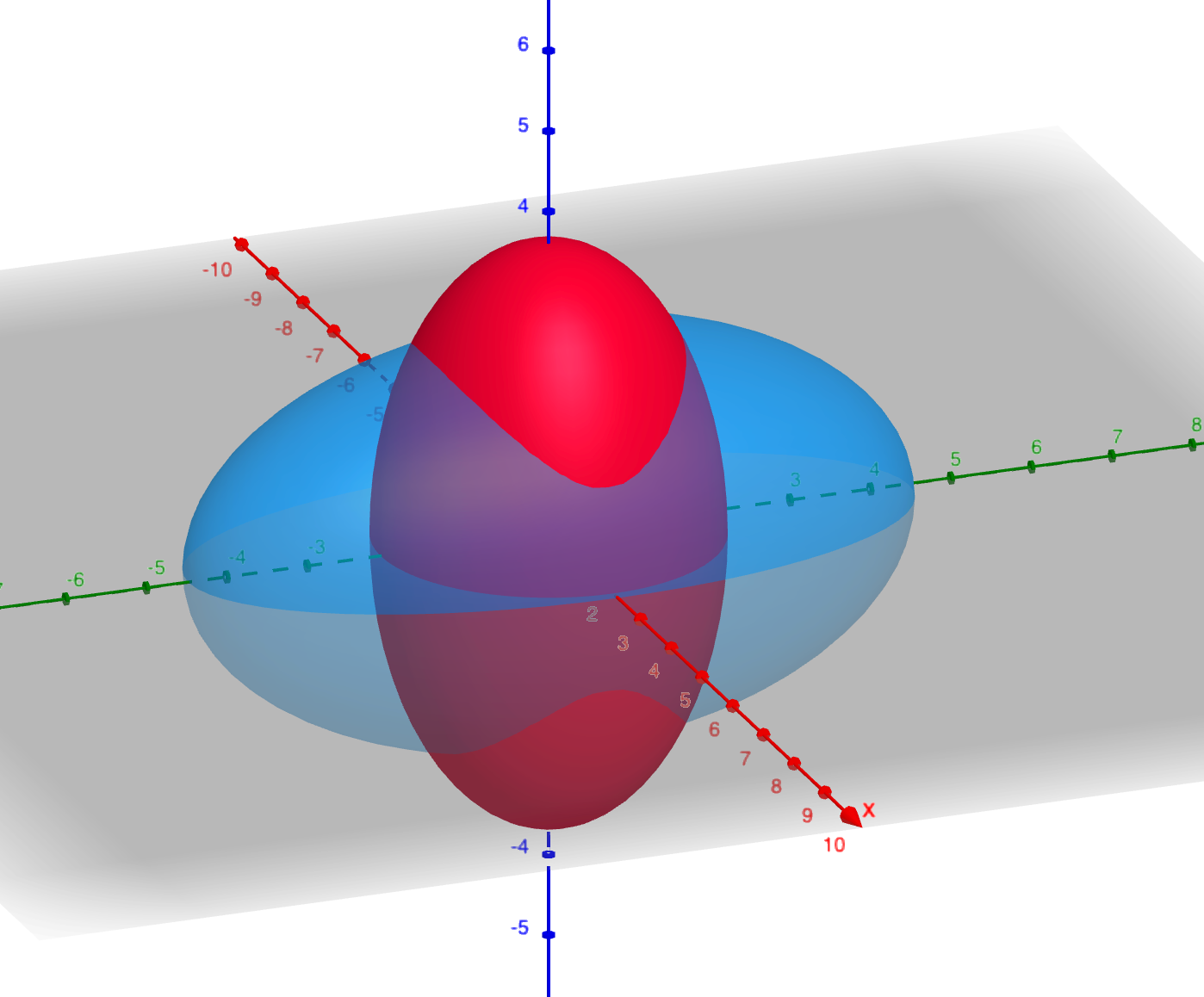
위의 두 식은 각각 타원체를 나타낸다. 따라서 위의 예시 그림처럼, 두 타원체의 교선 위에서 \(\vec{\omega}\) 가 이동할 것임을 알 수 있다. 따라서 우리는 초기 조건에 따라 타원체가 어떠한 형태를 가지는지 분석하여 초기 조건에 따른 물체의 회전 운동을 분석할 것이다.
구체적인 연립
상황마다 다르게 생긴 타원체를 모두 그리는 것은 필자 or 그림작가에게는 너무나 가혹한 행위라고 생각되기 때문에 말로 때우도록 하겠다.
\(I_x < I_y < I_z\) 로 가정한다.
1. 각 운동량 (\(\vec{L}\)) 보존
\[I_x^2 \omega_0^2 = I_x^2 \omega_x^2 + I_y^2 \omega_y^2 + I_z^2 \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \omega_0, \quad |\omega_y| \leq \frac{I_x}{I_y} \omega_0, \quad |\omega_z| \leq \frac{I_x}{I_z} \omega_0\]
2. 운동에너지 (\(T\)) 보존
\[I_x \omega_0^2 = I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \omega_0, \quad |\omega_y| \leq \sqrt{\frac{I_x}{I_y}} \omega_0, \quad |\omega_z| \leq \sqrt{\frac{I_x}{I_z}} \omega_0\]
위에서 도출된 범위 조건들로 각 타원체의 \(x, y, z\) 절편을 결정하면, 전체적으로는 \((\vec{L} 보존 타원체) \subseteq (T 보존 타원체)\) 의 형태가 나오고, \(x = \pm \omega_0\) 에서만 두 타원체의 교점이 생기게 된다. 따라서 \(\vec{\omega} = \overset{\longrightarrow}{\omega_0}\) 이고 이 식은 회전축이 처음의 회전축과 일치함을 나타낸다.
1. 각 운동량 (\(\vec{L}\)) 보존
\[I_z^2 \omega_0^2 = I_x^2 \omega_x^2 + I_y^2 \omega_y^2 + I_z^2 \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \frac{I_z}{I_x} \omega_0, \quad |\omega_y| \leq \frac{I_z}{I_y} \omega_0, \quad |\omega_z| \leq \omega_0\]
2. 운동에너지 (\(T\)) 보존
\[I_z \omega_0^2 = I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \sqrt{\frac{I_z}{I_x}}, \omega_0 \quad |\omega_y| \leq \sqrt{\frac{I_z}{I_y}} \omega_0, \quad |\omega_z| \leq \omega_0\]
마찬가지의 방법으로 진행하면, 이번에는 \((T 보존 타원체) \subseteq (\vec{L} 보존 타원체)\) 의 형태가 나오고, \(z = \pm \omega_0\) 에서만 두 타원체의 교점이 생기게 된다. 따라서 이번에도 \(\vec{\omega} = \overset{\longrightarrow}{\omega_0}\) 이고 초기의 회전축과 나중의 회전축이 일치한다는 것을 알 수 있다.
1. 각 운동량 (\(\vec{L}\)) 보존
\[I_y^2 \omega_0^2 = I_x^2 \omega_x^2 + I_y^2 \omega_y^2 + I_z^2 \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \frac{I_y}{I_x} \omega_0, \quad |\omega_y| \leq \omega_0, \quad |\omega_z| \leq \frac{I_y}{I_z} \omega_0\]
2. 운동에너지 (\(T\)) 보존
\[I_y \omega_0^2 = I_x \omega_x^2 + I_y \omega_y^2 + I_z \omega_z^2 \\
\quad\Rightarrow\quad |\omega_x| \leq \sqrt{\frac{I_y}{I_x}} \omega_0, \quad |\omega_y| \leq \omega_0, \quad |\omega_z| \leq \sqrt{\frac{I_y}{I_z}} \omega_0\]
드디어 마지막으로 위에서 도출된 범위 조건들로 각 타원체의 \(x, y, z\) 절편을 결정하면, \(x\) 절편은 \(\vec{L}보존 타원체\) 가 더 크고, \(y\) 절편은 두 타원체가 같고, \(z\) 절편은 \(T 보존 타원체\) 가 더 크다. 따라서 필연적으로 두 타원체의 교선이 생기게 되고, 그 교선을 따라서 각속도 벡터가 이동한다는 것을 알 수 있다. 즉, 회전축이 계속 바뀌게 된다!
처음의 예시의 경우에 대입해본다면, k 축과 l 축은 Case 1 과 Case 2 와 비슷한 상황으로 볼 수 있고, m 축은 Case 3 와 비슷한 상황으로 볼 수 있다. 짜라란
Conclusion
나름 제목에 강체의 자유 회전이라고 써 놓았지만, 글에서 설명하는 과정에 있어서 초기 조건이 굉장히 단순했다는 것을 감안하면, 완벽하게 일반화를 한 상황은 아니다. (실제로 일반적인 초기 조건의 해는 타원적분을 포함하는 형태가 나온다고 한다 심심한 사람은 한번 유도해보자) 따라서 이런 느낌으로 생각을 하고 설명을 하는구나 정도로만 생각하자. 필자의 지식이 매 글에서 강조했다시피 굉장히 얕기 때문에 잘 가려서 읽으면 될 것 같다. 이상한 것이 있으면 직접 찾아보고 이해하도록 하자. 또한 오류 수정이 많을수록 더 나은 글이 될 수 있으므로 틀린 내용이 있다면 꼭 댓글로 제보해주기를 바란다.



Comments ()